
簡介
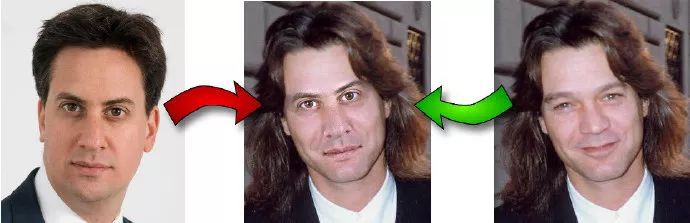
在這篇文章中我將介紹如何寫一個簡短(200行)的 Python 指令碼,來自動地將一幅圖片的臉替換為另一幅圖片的臉。
這個過程分四步:
-
檢測臉部標記。
-
旋轉、縮放、平移和第二張圖片,以配合第一步。
-
調整第二張圖片的色彩平衡,以適配第一張圖片。
-
把第二張影象的特性混合在第一張影象中。
1.使用 dlib 提取面部標記
該指令碼使用 dlib 的 Python 系結來提取面部標記:

Dlib 實現了 Vahid Kazemi 和 Josephine Sullivan 的《使用回歸樹一毫秒臉部對準》論文中的演演算法。演演算法本身非常複雜,但dlib介面使用起來非常簡單:
PREDICTOR_PATH = “/home/matt/dlib-18.16/shape_predictor_68_face_landmarks.dat”
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor(PREDICTOR_PATH)
def get_landmarks(im):
rects = detector(im, 1)
if len(rects) > 1:
raise TooManyFaces
if len(rects) == 0:
raise NoFaces
return numpy.matrix([[p.x, p.y] for p in predictor(im, rects[0]).parts()])
get_landmarks()函式將一個影象轉化成numpy陣列,並傳回一個68×2元素矩陣,輸入影象的每個特徵點對應每行的一個x,y坐標。
特徵提取器(predictor)需要一個粗糙的邊界框作為演演算法輸入,由一個傳統的能傳回一個矩形串列的人臉檢測器(detector)提供,其每個矩形串列在影象中對應一個臉。
2.用 Procrustes 分析調整臉部
現在我們已經有了兩個標記矩陣,每行有一組坐標對應一個特定的面部特徵(如第30行的坐標對應於鼻頭)。我們現在要解決如何旋轉、翻譯和縮放第一個向量,使它們盡可能適配第二個向量的點。一個想法是可以用相同的變換在第一個影象上改寫第二個影象。
將這個問題數學化,尋找T,s 和 R,使得下麵這個運算式:

結果最小,其中R是個2×2正交矩陣,s是標量,T是二維向量,pi和qi是上面標記矩陣的行。
事實證明,這類問題可以用“常規 Procrustes 分析法”解決:
def transformation_from_points(points1, points2):
points1 = points1.astype(numpy.float64)
points2 = points2.astype(numpy.float64)
c1 = numpy.mean(points1, axis=0)
c2 = numpy.mean(points2, axis=0)
points1 -= c1
points2 -= c2
s1 = numpy.std(points1)
s2 = numpy.std(points2)
points1 /= s1
points2 /= s2
U, S, Vt = numpy.linalg.svd(points1.T * points2)
R = (U * Vt).T
return numpy.vstack([numpy.hstack(((s2 / s1) * R,
c2.T – (s2 / s1) * R * c1.T)),
numpy.matrix([0., 0., 1.])])
程式碼實現了這幾步:
1.將輸入矩陣轉換為浮點數。這是後續操作的基礎。
2.每一個點集減去它的矩心。一旦為點集找到了一個最佳的縮放和旋轉方法,這兩個矩心 c1 和 c2 就可以用來找到完整的解決方案。
3.同樣,每一個點集除以它的標準偏差。這會消除元件縮放偏差的問題。
4.使用奇異值分解計算旋轉部分。可以在維基百科上看到關於解決正交 Procrustes 問題的細節。
5.利用仿射變換矩陣傳回完整的轉化。
其結果可以插入 OpenCV 的 cv2.warpAffine 函式,將影象二對映到影象一:
def warp_im(im, M, dshape):
output_im = numpy.zeros(dshape, dtype=im.dtype)
cv2.warpAffine(im,
M[:2],
(dshape[1], dshape[0]),
dst=output_im,
borderMode=cv2.BORDER_TRANSPARENT,
flags=cv2.WARP_INVERSE_MAP)
return output_im
對齊結果如下:

3.校正第二張影象的顏色
如果我們試圖直接改寫面部特徵,很快會看到這個問題:

這個問題是兩幅影象之間不同的膚色和光線造成了改寫區域的邊緣不連續。我們試著修正:
COLOUR_CORRECT_BLUR_FRAC = 0.6
LEFT_EYE_POINTS = list(range(42, 48))
RIGHT_EYE_POINTS = list(range(36, 42))
def correct_colours(im1, im2, landmarks1):
blur_amount = COLOUR_CORRECT_BLUR_FRAC * numpy.linalg.norm(
numpy.mean(landmarks1[LEFT_EYE_POINTS], axis=0) –
numpy.mean(landmarks1[RIGHT_EYE_POINTS], axis=0))
blur_amount = int(blur_amount)
if blur_amount % 2 == 0:
blur_amount += 1
im1_blur = cv2.GaussianBlur(im1, (blur_amount, blur_amount), 0)
im2_blur = cv2.GaussianBlur(im2, (blur_amount, blur_amount), 0)
# Avoid divide-by-zero errors.
im2_blur += 128 * (im2_blur <= 1.0)
return (im2.astype(numpy.float64) * im1_blur.astype(numpy.float64) /
im2_blur.astype(numpy.float64))
結果如下:

此函式試圖改變 im2 的顏色來適配 im1。它透過用 im2 除以 im2 的高斯模糊值,然後乘以im1的高斯模糊值。這裡的想法是用RGB縮放校色,但並不是用所有影象的整體常數比例因子,每個畫素都有自己的區域性比例因子。
用這種方法兩影象之間光線的差異只能在某種程度上被修正。例如,如果影象1是從一側照亮,但影象2是被均勻照亮的,色彩校正後影象2也會出現未照亮一側暗一些的問題。
也就是說,這是一個相當簡陋的辦法,而且解決問題的關鍵是一個適當的高斯核函式大小。如果太小,第一個影象的面部特徵將顯示在第二個影象中。過大,核心之外區域畫素被改寫,併發生變色。這裡的核心用了一個0.6 *的瞳孔距離。
4.把第二張影象的特徵混合在第一張影象中
用一個遮罩來選擇影象2和影象1的哪些部分應該是最終顯示的影象:

值為1(顯示為白色)的地方為影象2應該顯示出的區域,值為0(顯示為黑色)的地方為影象1應該顯示出的區域。值在0和1之間為影象1和影象2的混合區域。
這是生成上圖的程式碼:
LEFT_EYE_POINTS = list(range(42, 48))
RIGHT_EYE_POINTS = list(range(36, 42))
LEFT_BROW_POINTS = list(range(22, 27))
RIGHT_BROW_POINTS = list(range(17, 22))
NOSE_POINTS = list(range(27, 35))
MOUTH_POINTS = list(range(48, 61))
OVERLAY_POINTS = [
LEFT_EYE_POINTS + RIGHT_EYE_POINTS + LEFT_BROW_POINTS + RIGHT_BROW_POINTS,
NOSE_POINTS + MOUTH_POINTS,
]
FEATHER_AMOUNT = 11
def draw_convex_hull(im, points, color):
points = cv2.convexHull(points)
cv2.fillConvexPoly(im, points, color=color)
def get_face_mask(im, landmarks):
im = numpy.zeros(im.shape[:2], dtype=numpy.float64)
for group in OVERLAY_POINTS:
draw_convex_hull(im,
landmarks[group],
color=1)
im = numpy.array([im, im, im]).transpose((1, 2, 0))
im = (cv2.GaussianBlur(im, (FEATHER_AMOUNT, FEATHER_AMOUNT), 0) > 0) * 1.0
im = cv2.GaussianBlur(im, (FEATHER_AMOUNT, FEATHER_AMOUNT), 0)
return im
mask = get_face_mask(im2, landmarks2)
warped_mask = warp_im(mask, M, im1.shape)
combined_mask = numpy.max([get_face_mask(im1, landmarks1), warped_mask],
axis=0)
我們把上述過程分解:
-
get_face_mask()的定義是為一張影象和一個標記矩陣生成一個遮罩,它畫出了兩個白色的凸多邊形:一個是眼睛周圍的區域,一個是鼻子和嘴部周圍的區域。之後它由11個畫素向遮罩的邊緣外部羽化擴充套件,可以幫助隱藏任何不連續的區域。
-
這樣一個遮罩同時為這兩個影象生成,使用與步驟2中相同的轉換,可以使影象2的遮罩轉化為影象1的坐標空間。
-
之後,透過一個element-wise最大值,這兩個遮罩結合成一個。結合這兩個遮罩是為了確保影象1被掩蓋,而顯現出影象2的特性。
最後,使用遮罩得到最終的影象:
output_im = im1 * (1.0 – combined_mask) + warped_corrected_im2 * combined_mask

完整程式碼(link):
import cv2
import dlib
import numpy
import sys
PREDICTOR_PATH = “/home/matt/dlib-18.16/shape_predictor_68_face_landmarks.dat”
SCALE_FACTOR = 1
FEATHER_AMOUNT = 11
FACE_POINTS = list(range(17, 68))
MOUTH_POINTS = list(range(48, 61))
RIGHT_BROW_POINTS = list(range(17, 22))
LEFT_BROW_POINTS = list(range(22, 27))
RIGHT_EYE_POINTS = list(range(36, 42))
LEFT_EYE_POINTS = list(range(42, 48))
NOSE_POINTS = list(range(27, 35))
JAW_POINTS = list(range(0, 17))
# Points used to line up the images.
ALIGN_POINTS = (LEFT_BROW_POINTS + RIGHT_EYE_POINTS + LEFT_EYE_POINTS +
RIGHT_BROW_POINTS + NOSE_POINTS + MOUTH_POINTS)
# Points from the second image to overlay on the first. The convex hull of each
# element will be overlaid.
OVERLAY_POINTS = [
LEFT_EYE_POINTS + RIGHT_EYE_POINTS + LEFT_BROW_POINTS + RIGHT_BROW_POINTS,
NOSE_POINTS + MOUTH_POINTS,
]
# Amount of blur to use during colour correction, as a fraction of the
# pupillary distance.
COLOUR_CORRECT_BLUR_FRAC = 0.6
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor(PREDICTOR_PATH)
class TooManyFaces(Exception):
pass
class NoFaces(Exception):
pass
def get_landmarks(im):
rects = detector(im, 1)
if len(rects) > 1:
raise TooManyFaces
if len(rects) == 0:
raise NoFaces
return numpy.matrix([[p.x, p.y] for p in predictor(im, rects[0]).parts()])
def annotate_landmarks(im, landmarks):
im = im.copy()
for idx, point in enumerate(landmarks):
pos = (point[0, 0], point[0, 1])
cv2.putText(im, str(idx), pos,
fontFace=cv2.FONT_HERSHEY_SCRIPT_SIMPLEX,
fontScale=0.4,
color=(0, 0, 255))
cv2.circle(im, pos, 3, color=(0, 255, 255))
return im
def draw_convex_hull(im, points, color):
points = cv2.convexHull(points)
cv2.fillConvexPoly(im, points, color=color)
def get_face_mask(im, landmarks):
im = numpy.zeros(im.shape[:2], dtype=numpy.float64)
for group in OVERLAY_POINTS:
draw_convex_hull(im,
landmarks[group],
color=1)
im = numpy.array([im, im, im]).transpose((1, 2, 0))
im = (cv2.GaussianBlur(im, (FEATHER_AMOUNT, FEATHER_AMOUNT), 0) > 0) * 1.0
im = cv2.GaussianBlur(im, (FEATHER_AMOUNT, FEATHER_AMOUNT), 0)
return im
def transformation_from_points(points1, points2):
“””
Return an affine transformation [s * R | T] such that:
sum ||s*R*p1,i + T – p2,i||^2
is minimized.
“””
# Solve the procrustes problem by subtracting centroids, scaling by the
# standard deviation, and then using the SVD to calculate the rotation. See
# the following for more details:
# https://en.wikipedia.org/wiki/Orthogonal_Procrustes_problem
points1 = points1.astype(numpy.float64)
points2 = points2.astype(numpy.float64)
c1 = numpy.mean(points1, axis=0)
c2 = numpy.mean(points2, axis=0)
points1 -= c1
points2 -= c2
s1 = numpy.std(points1)
s2 = numpy.std(points2)
points1 /= s1
points2 /= s2
U, S, Vt = numpy.linalg.svd(points1.T * points2)
# The R we seek is in fact the transpose of the one given by U * Vt. This
# is because the above formulation assumes the matrix goes on the right
# (with row vectors) where as our solution requires the matrix to be on the
# left (with column vectors).
R = (U * Vt).T
return numpy.vstack([numpy.hstack(((s2 / s1) * R,
c2.T – (s2 / s1) * R * c1.T)),
numpy.matrix([0., 0., 1.])])
def read_im_and_landmarks(fname):
im = cv2.imread(fname, cv2.IMREAD_COLOR)
im = cv2.resize(im, (im.shape[1] * SCALE_FACTOR,
im.shape[0] * SCALE_FACTOR))
s = get_landmarks(im)
return im, s
def warp_im(im, M, dshape):
output_im = numpy.zeros(dshape, dtype=im.dtype)
cv2.warpAffine(im,
M[:2],
(dshape[1], dshape[0]),
dst=output_im,
borderMode=cv2.BORDER_TRANSPARENT,
flags=cv2.WARP_INVERSE_MAP)
return output_im
def correct_colours(im1, im2, landmarks1):
blur_amount = COLOUR_CORRECT_BLUR_FRAC * numpy.linalg.norm(
numpy.mean(landmarks1[LEFT_EYE_POINTS], axis=0) –
numpy.mean(landmarks1[RIGHT_EYE_POINTS], axis=0))
blur_amount = int(blur_amount)
if blur_amount % 2 == 0:
blur_amount += 1
im1_blur = cv2.GaussianBlur(im1, (blur_amount, blur_amount), 0)
im2_blur = cv2.GaussianBlur(im2, (blur_amount, blur_amount), 0)
# Avoid divide-by-zero errors.
im2_blur += 128 * (im2_blur <= 1.0)
return (im2.astype(numpy.float64) * im1_blur.astype(numpy.float64) /
im2_blur.astype(numpy.float64))
im1, landmarks1 = read_im_and_landmarks(sys.argv[1])
im2, landmarks2 = read_im_and_landmarks(sys.argv[2])
M = transformation_from_points(landmarks1[ALIGN_POINTS],
landmarks2[ALIGN_POINTS])
mask = get_face_mask(im2, landmarks2)
warped_mask = warp_im(mask, M, im1.shape)
combined_mask = numpy.max([get_face_mask(im1, landmarks1), warped_mask],
axis=0)
warped_im2 = warp_im(im2, M, im1.shape)
warped_corrected_im2 = correct_colours(im1, warped_im2, landmarks1)
output_im = im1 * (1.0 – combined_mask) + warped_corrected_im2 * combined_mask
cv2.imwrite(‘output.jpg’, output_im)
編譯: Python開發者 – LynnShaw 英文:Matthew Earl
http://python.jobbole.com/82546/
《Python人工智慧和全棧開發》2018年07月23日即將在北京開課,120天衝擊Python年薪30萬,改變速約~~~~
*宣告:推送內容及圖片來源於網路,部分內容會有所改動,版權歸原作者所有,如來源資訊有誤或侵犯權益,請聯絡我們刪除或授權事宜。
– END –


更多Python好文請點選【閱讀原文】哦
↓↓↓
