
點選 《福利來了!PLC的資料(免費),你要嗎?》

PID控制,是我們最為熟悉、應用最為廣泛的一種控制方案,它是比例、積分和微分調節規律的線性組合,吸取了比例調節的快速反應功能、積分調節的消除誤差功能和微分調節的預測功能等優點,同時彌補了三者的不足,是一種比較理想的複合調節規律。
在PKS系統裡,怎麼來實現PID控制方案的組態呢?
首先還是離不開大名鼎鼎的CM(Control Module)。
在PID控制迴路的CM裡,一共包含四個功能塊:
1個AI Channel
1個DATAACQ(隨後需更名為DACA)功能塊
1個PID功能塊
1個AO Channel
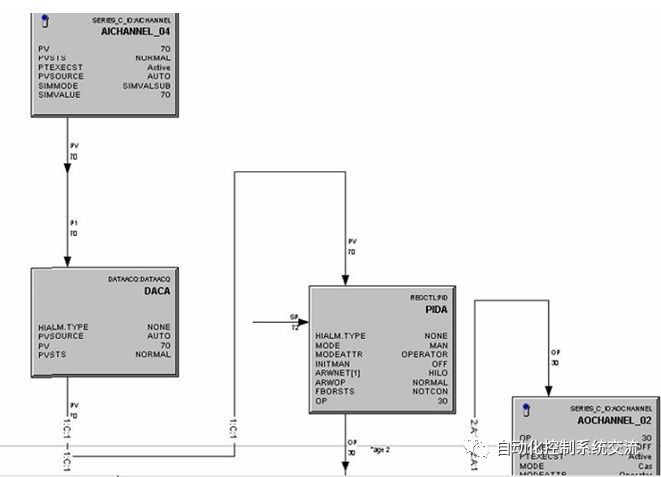
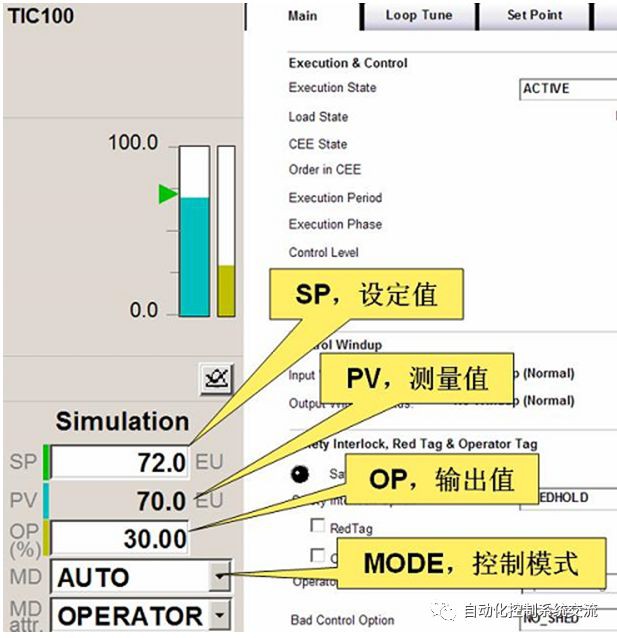
AI Channel和DACA功能塊與監視迴路中的一模一樣。PID功能塊是PID控制迴路中的主角,它負責把DACA處理好的檢測資料與標的值(即SP值,設定值,通常情況下由操作人員手動輸入)進行比較,在偏差的基礎上(SP-PV)進行比例、積分和微分的複合運算,得到輸出值(OP值)。
PID迴路的操作介面如下:
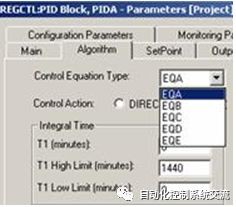
在PID功能塊裡,你還可以選擇PID演演算法的計算公式,也就是說,你可以把P、I、D三種控制方式重新組合。
演演算法A:標準的PID的公式,即比例、積分和微分都作用在偏差值上
演演算法B:比例和積分作用在偏差上,微分只作用在PV值的變化上,他相對弱化了微分的功能,避免了因微分的超調對過程造成的擾動。
演演算法C:比例作用在偏差上,比例和微分都作用在PV值的變化上。
演演算法D:只有積分作用,即純積分控制器。
演演算法E:只有比例作用,即純比例控制器。
演演算法A和演演算法B是最為常用的2個演演算法。
輸出值是一個0-100%的數值,它透過AO Channel(對應於硬體AO卡上的某一個通道),轉換為4-20mA的訊號,送到現場的閥門定位器,以控制閥門的開度。

